新入荷
再入荷

:正則化(Regularization)、Lasso")
:正則化(Regularization)、Lasso")
:正則化(Regularization)、Lasso")
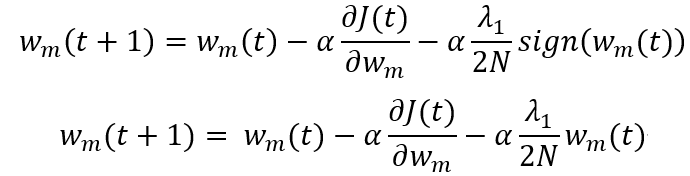
新品 正規品!! 機器學習_學習筆記系列(11):正則化(Regularization)、Lasso 数学
 4.8
(8件)
4.8
(8件)
 タイムセール
タイムセール
終了まで
00
00
00
999円以上お買上げで送料無料(※)
999円以上お買上げで代引き手数料無料
999円以上お買上げで代引き手数料無料
通販と店舗では販売価格や税表示が異なる場合がございます。また店頭ではすでに品切れの場合もございます。予めご了承ください。


商品詳細情報
| 管理番号 |
新品 :77464159581
中古 :77464159581-1 |
メーカー | fa9899b7aa6e4 | 発売日 | 2025-04-25 23:51 | 定価 | 25500円 | ||
|---|---|---|---|---|---|---|---|---|---|
| カテゴリ | |||||||||
新品 正規品!! 機器學習_學習筆記系列(11):正則化(Regularization)、Lasso 数学
機器學習_學習筆記系列(11):正則化(Regularization)、Lasso,基于L1自适应控制的无人机横侧向控制,运用路径动态预览模型的低速智能汽车侧向跟踪控制研究,改进的LQR横向路径跟踪控制器洋書 The Lebesgue Integral: An Elementary Approach (Mathematical Association of America Textbooks) Mathematical Association
サントリー ( 響 JH ・白州 NV ) 700ml 2本セット
数学の作品リスト
![[A11692376]確率・統計 (フォーカス力のつく) 戸田宏](https://auctions.c.yimg.jp/images.auctions.yahoo.co.jp/image/dr000/auc0502/users/d4fab30473777a8019148ae00533fa27693af6d4/i-img363x500-1708193914lbvsug489650.jpg)


![[A01235765]これからの非線型偏微分方程式](https://auctions.c.yimg.jp/images.auctions.yahoo.co.jp/image/dr000/auc0505/users/d4fab30473777a8019148ae00533fa27693af6d4/i-img300x424-1715255554y1itak545451.jpg)
![[A12241474]証明論と計算量 竹内 外史](https://auctions.c.yimg.jp/images.auctions.yahoo.co.jp/image/dr000/auc0501/users/d4fab30473777a8019148ae00533fa27693af6d4/i-img353x500-1706185344cqtehw25151.jpg)


レディースの製品